
Un equipo de ingenieros ha desarrollado un motor fluídico extremadamente ligero diseñado para impulsar robots blandos en dispositivos de asistencia. La característica más destacada de este nuevo motor es su capacidad para generar una fuerza sustancial de manera autónoma, sin depender de una fuente de energía externa.
Según los investigadores de la Universidad Estatal de Carolina del Norte, el motor funciona mediante un principio de dinámica de fluidos, dirigiendo aceite dentro y fuera de una cámara dentro del robot blando.

Los robots blandos impulsados por motores fluídicos, como los sistemas hidráulicos o neumáticos, pueden imitar el comportamiento muscular de maneras que los robots rígidos no pueden, haciéndolos altamente atractivos para dispositivos de asistencia destinados a mejorar la movilidad de las extremidades superiores e inferiores.
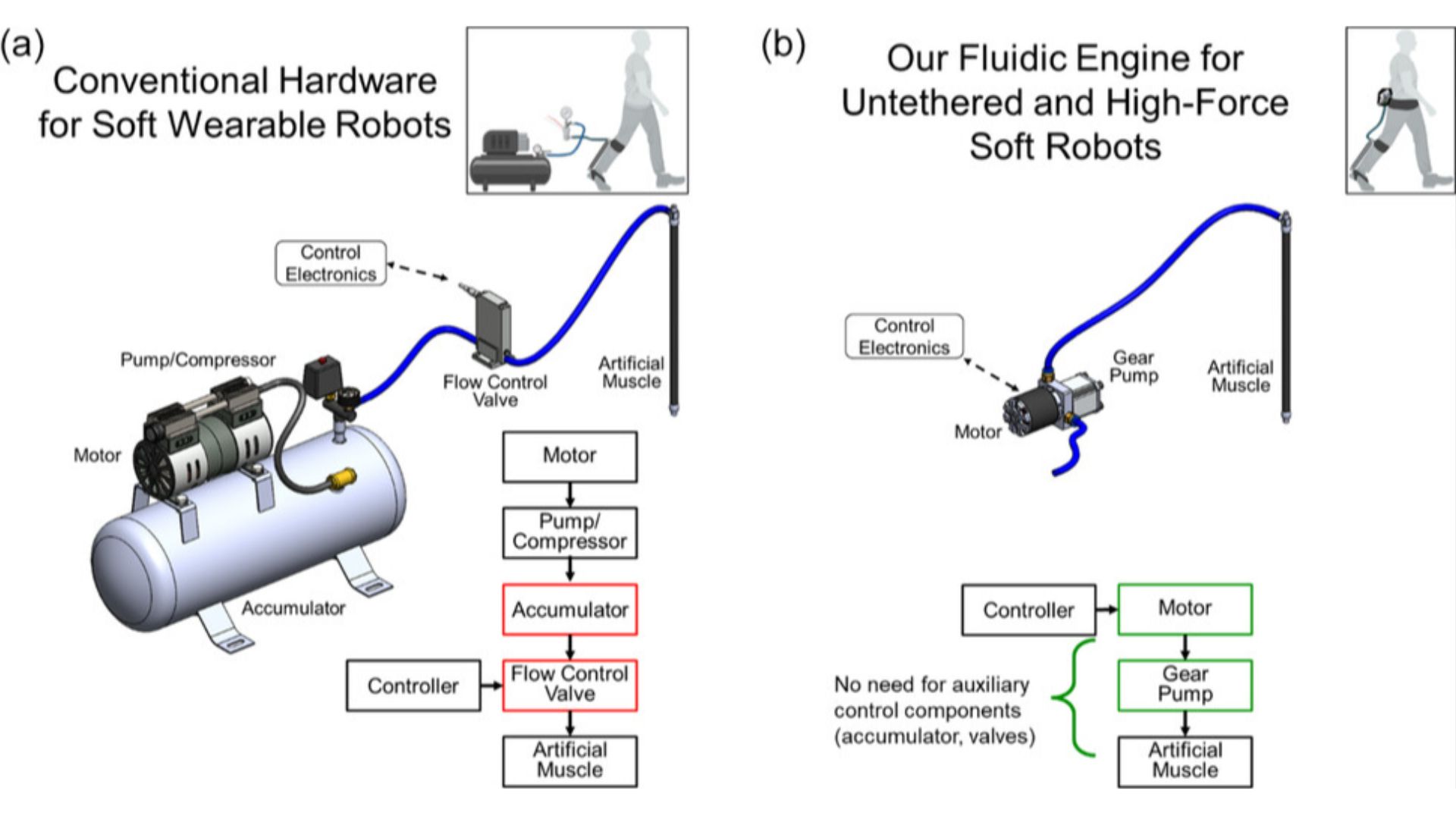
Los motores fluídicos tradicionales suelen estar conectados a fuentes de energía externas, como grandes compresores de aire, lo que limita su versatilidad. Intentos previos de motores fluídicos sin fuentes externas no lograban generar suficiente fuerza, limitando su aplicación práctica.
Hao Su, profesor asociado de ingeniería mecánica y aeroespacial en la Universidad y autor del estudio, explicó: «Nuestro trabajo aborda ambos desafíos. Nuestro motor fluídico no está conectado a una fuente externa pero aún puede generar hasta 580 Newtons de fuerza».
El motor fluídico de los investigadores presenta una bomba impulsada por un motor de alto torque alimentado por una batería, lo que permite que el músculo artificial produzca una fuerza considerable. Este diseño se compone de dos partes:
- Un sistema de accionamiento directo con un motor, bomba de engranajes y músculo hidráulico artificial (HAM), creando un conjunto compacto y liviano sin válvulas.
- Un motor fluídico con un motor de alto torque y una bomba de engranajes personalizada que genera alta presión para impulsar el HAM, entregando fuerzas significativas.
Durante las pruebas de concepto, los investigadores evaluaron la capacidad del nuevo motor para generar fuerza y su eficiencia en la conversión de energía eléctrica a energía fluídica. Los resultados mostraron que, comparado con los diseños tradicionales limitados en fuerza o conectados a fuentes estacionarias, el nuevo diseño logra portabilidad (1.6 kg) y alta capacidad de fuerza (580 N), cruciales para aplicaciones en entornos comunitarios.
Los resultados experimentales demostraron que genera hasta 0.75 MPa de presión con un 15% de eficiencia máxima, impulsando un músculo McKibben con una fuerza de 580 N y un ratio de contracción del 21%.
El equipo asegura que al combinar la conformidad hidráulica con el control eléctrico, este enfoque ofrece una alta densidad de potencia, esencial para la reducción de peso en dispositivos de asistencia y aeroespaciales. Antonio Di Lallo, investigador postdoctoral en la Universidad y primer autor del estudio, señaló: «Hemos logrado generar una cantidad de fuerza sin precedentes para un motor autónomo, manteniendo el peso del motor fluídico bajo».










